Ce fichier sert uniquement à réaliser un affichage correcte lors de l'éxecution @authro SD. Plus de détails...
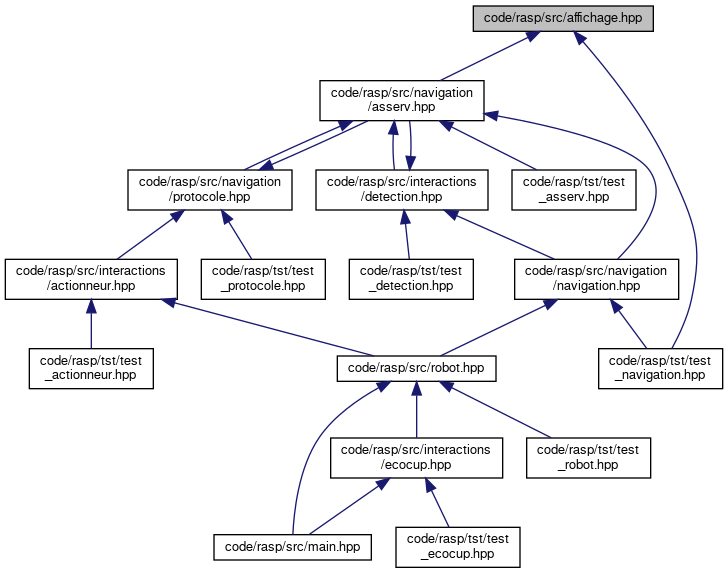
#include <stdio.h>#include <cstdlib>
Graphe des dépendances par inclusion de affichage.hpp:
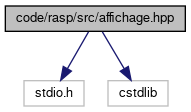
Ce graphe montre quels fichiers incluent directement ou indirectement ce fichier :
Aller au code source de ce fichier.
Macros | |
| #define | TIMEOUT 0 |
| #define | DETECTION 0 |
Fonctions | |
| void | print_timeout () |
| Permet d'afficher TIMEOUT en rouge. | |
| void | print_success () |
| Permet d'afficher SUCCESS en vert. | |
| void | print_fail () |
| Permet d'afficher FAILED en rouge. | |
| void | print_detection () |
| Permet d'afficher DETECTION en orange. | |
| void | affichage (int asserv_back) |
| Permet d'afficher timeout/success/fail en fonction du retour du protocole de communication. Plus de détails... | |
| void | print_optimisated () |
| Permet d'afficher UNOPTIMIZED en orange. | |
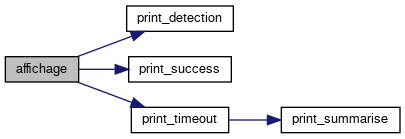
| void | print_summarise () |
| Permet d'afficher un résumé d'une éxecution. Permet d'afficher le nombre de succès, de timeout, d'échec et de fois où le robot est arrivé au point attendu. Si la variable debug est à 1 cela affiche aussi le nombre de trajectoires non optimisée. | |
Variables | |
| bool | debug |
Description détaillée
Ce fichier sert uniquement à réaliser un affichage correcte lors de l'éxecution @authro SD.
Documentation des fonctions
◆ affichage()
| void affichage | ( | int | asserv_back | ) |
Permet d'afficher timeout/success/fail en fonction du retour du protocole de communication.
- Paramètres
-
asserv_back un entier correspondant au retour du prototocole, 1 pour timeout, 2 pour détection, 3 pour problème majeur et 0 en cas normal
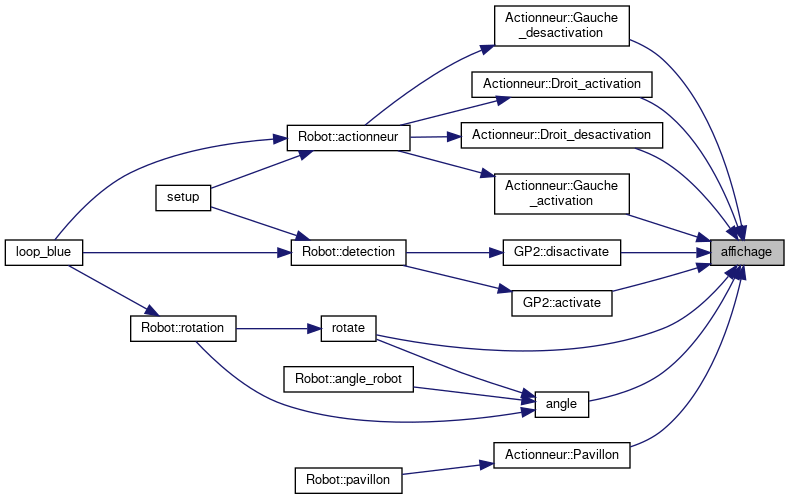
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :