Référence de la classe Actionneur
Contient toutes les méthodes permettant de gérer les actionneurs du robot. Plus de détails...
#include <actionneur.hpp>
Fonctions membres publiques | |
| void | Gauche_activation () |
| Permet de demander au protocole la sortie de l'actionneur. Plus de détails... | |
| void | Gauche_desactivation () |
| Permet de demander au protocole la rentrée de l'actionneur. Plus de détails... | |
| void | Droit_activation () |
| Contient toutes les méthodes permettant de gérer les actionneurs du robot. Plus de détails... | |
| void | Droit_desactivation () |
| Permet de demander au protocole la rentrée de l'actionneur. Plus de détails... | |
| void | Pavillon () |
| Permet de demander au protocole l'activation du pavillon. Plus de détails... | |
Description détaillée
Contient toutes les méthodes permettant de gérer les actionneurs du robot.
Documentation des fonctions membres
◆ Droit_activation()
| void Actionneur::Droit_activation | ( | ) |
Contient toutes les méthodes permettant de gérer les actionneurs du robot.
Permet de demander au protocole la sortie de l'actionneur
- Renvoie
- Rien, à modifier pour la compatibilité avec le protocole
Voici le graphe d'appel pour cette fonction :

Voici le graphe des appelants de cette fonction :

◆ Droit_desactivation()
| void Actionneur::Droit_desactivation | ( | ) |
Permet de demander au protocole la rentrée de l'actionneur.
- Renvoie
- Rien, à modifier pour la compatibilité avec le protocole
Voici le graphe d'appel pour cette fonction :

Voici le graphe des appelants de cette fonction :

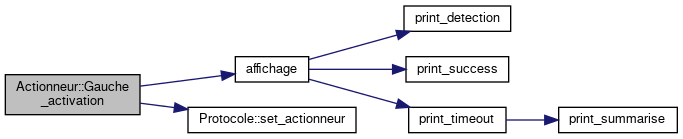
◆ Gauche_activation()
| void Actionneur::Gauche_activation | ( | ) |
Permet de demander au protocole la sortie de l'actionneur.
- Renvoie
- Rien, à modifier pour la compatibilité avec le protocole
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :

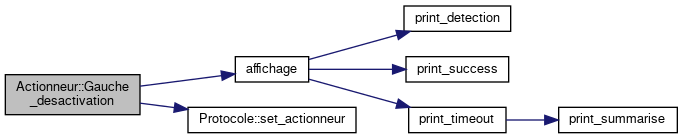
◆ Gauche_desactivation()
| void Actionneur::Gauche_desactivation | ( | ) |
Permet de demander au protocole la rentrée de l'actionneur.
- Renvoie
- Rien, à modifier pour la compatibilité avec le protocole
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :

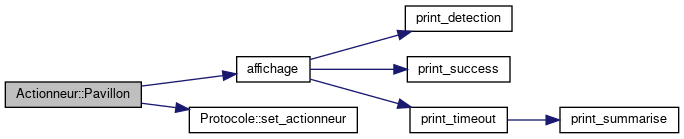
◆ Pavillon()
| void Actionneur::Pavillon | ( | ) |
Permet de demander au protocole l'activation du pavillon.
- Renvoie
- Rien, à modifier pour la compatibilité avec le protocole
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :

La documentation de cette classe a été générée à partir du fichier suivant :
- code/rasp/src/interactions/actionneur.hpp
- code/rasp/src/interactions/actionneur.cpp