
Coupe de France de Robotique 2021
Voici un résumé de la réunion :
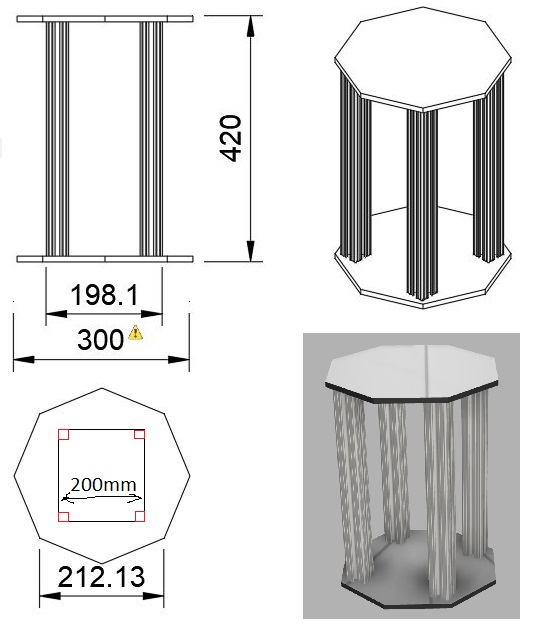
PARTIE MÉCANIQUE
- Choix d’une structure octogonale pour la plateforme du robot
- Utilisation de 4 profilés en aluminium (30x30 ou 40x40mm ?)
Propositions d’idées sur un système de montage des cartes électroniques sur le robot.
BUT : être capable de retirer une carte sans retirer les autres autour.
- Nappe IDC3 type ATA133 avec plusieurs connecteurs
- Glissière/rail de maintient des cartes
- Écrous papillon/boulon de fixation des cartes
En cours :).
PARTIE INFORMATIQUE
Ils n’ont pas encore tous les éléments pour commencer à coder (entrées, sorties, but de chaque programme …). Le choix de la micro-ordinateur n’est pas encore fait :
- Raspberry Pi 4
- Nvidia Jetson Nano
NOTE : attention au protocole de communication entre le uC et la carte info :).
PARTIE ÉLECTRONIQUE
ALIMENTATION
- Victor a terminé la carte, il va bientôt la fabriquer à l’ENSEIRB
MOTEURS
- On récupère une paire de moto-réducteurs+roues+codeurs
- Ils sont surdimensionnés, pour être tranquille
- Rappel : la carte de contrôle des moteurs supporte 2*90W
CAPTEURS
Voici les principales technologies qui ont été retenues :
- Infrarouge (IR)
- Laser
- Ultrason ?
MICRO-CONTROLLEUR
Le choix est à faire (rapidement) mais voici quelques idées :
- STM32 (ST Nucléo)
- ATMEGA328 (Arduino Uno) ou ATMEGA2560 (Arduino Mega) ?
- AT91SAM3X8E (Arduino Due)
- ARM CORTEX M7 (Teensy 4.0)
POUR LA PROCHAINE REUNION :
- Réfléchir à des idées
- Établir un cahier des charges suffisamment clair et détaillé pour pouvoir commencer à bosser
- Discussions sur le logo de l’équipe :)