
Coupe de France de Robotique 2021
Voici un résumé de la réunion Gal’eirb :
-
PARTIE MÉCANIQUE
- Étude des dimensions de la structure en cours
- Étude du/des système(s) de fixation des cartes (1ers prototypes d’ici le 1er Février)
- Récupération des moto-réducteurs+codeurs pour mesures et dessin 3D
Rappel : tous les fichiers 3D sont disponibles sur le Drive.
La conception d’un structure modulable facilement et modifiable rapidement est clé, pour pouvoir sortir les cartes électroniques facilement. Mais aussi pour pouvoir loger les différents modules complémentaires (capteurs, moteurs, drapeau).
Un blindage électromagnétique facile à fixer est aussi envisagé entre les différentes cartes, afin d’améliorer la compatibilité électromagnétique des composants/cartes. (cf robot 4A)
-
PARTIE INFORMATIQUE
Débat sur la nécessité (ou pas) de coder sur un micro-ordinateur type Raspberry Pi 4.
Nous n’aurons pas vraiment le temps (conception) de séparer le traitement et l’envoi d’informations entre les différents capteurs/actionneurs, les différentes cartes, sur un processeur et un microcontrôleur.
La partie codage bas-niveau/haut-niveau sera faite en C/C++ sur microcontrôleur.
Difficultés :
- Avoir un code optimisé qui utilise peu de mémoire –> gestion de la mémoire
- Rapidité d’exécution des tâches –> complexité des fonctions/programmes
-
PARTIE ÉLECTRONIQUE
Le choix du microcontrôleur est donc essentiel au bon fonctionnement du robot. Une étude a donc était lancée pour la sélection d’un bon compromis (par Valentin, Victor, Kilian, Vincent).
Il a été envisagé de laisser sur les cartes électroniques de cette année, un peu de place pour quelques connecteurs ainsi qu’un espace équivalent à l’empreinte d’une raspberry pi 4, pour une amélioration du robot les années futures (et peut être cette année si on a le temps !).
Pour le montage des cartes, voici ce le système envisagé (à voir avec la partie méca pour la fixation des cartes) :
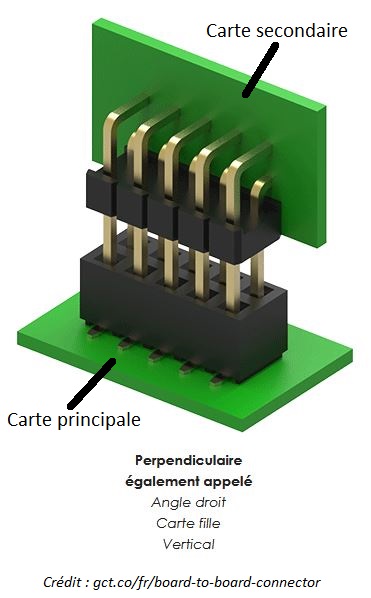
Une simple translation sera nécessaire pour sortir une carte du robot !
-
GÉNÉRAL / ORGANISATION
Pour une meilleure organisation, il a été nommé un responsable par mission à effectuer durant les 100 secondes du match de la coupe. Pour avoir des renseignements sur une partie précise du robot, il faudra donc demander à cette personne, qui aura été informée de tous les changements/solutions de sa partie. Voici ce qui a été décidé :
- Partie ASSERVISSEMENT/DEPLACEMENT - Victor
- Partie MANCHE A AIR - Vincent
- Partie PHARE - Mathieu
- Partie ARRIVER A BON PORT - Coralie
- Partie HISSER LE PAVILLON - Kilian
Le résumé du règlement de la coupe continue à être rédigé par Valentin et Mathieu (merci à eux pour le temps consacré et la qualité de leur travail :) ).
Les partiels approchant, la priorité est aux révisions.
Mais nous maintenons la prochaine réunion qui sera jeudi 14 janvier à 16h.