Répartition des rôles
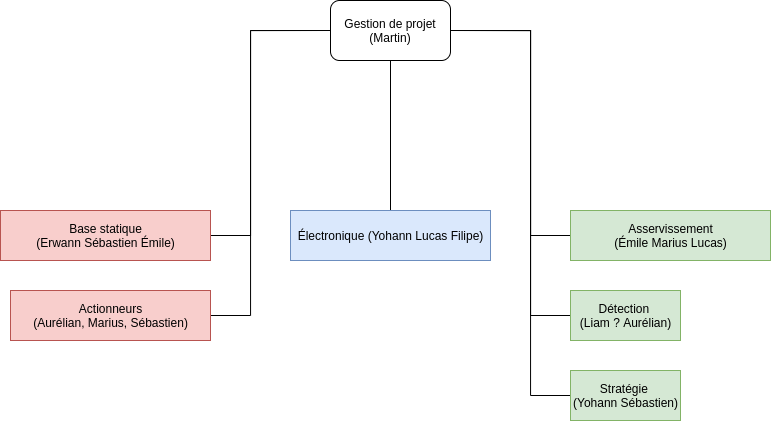
Définition des objectifs
Mécanique statique
On garde le système d’étage de l’an dernier mais on utilise une forme de robot octogonale aplati, l’objectif est de compresser le robot pour créer un actionneur de taille suffisante.
Actionneurs
Objectif de créer un actionneur pour ramasser les écocups présentent dans les écueils sur le côté et un actionneur pour relever les manches à air.
Électronique
Globalement identique à l’an dernier hormis le contrôle de l’actionneur si besoin
Asservissement
Revoir / supprimer l’asservissement en position, utiliser les murs pour la calibration et faire en sorte qu’il soit pas aussi lent du cul
Détection
Rajout d’un lidar sur le robot pour détecter ce qu’on peut => traitement des données du lidar
Stratégie
Partir sur quelque chose de très simple à base d’une machine à état très simple
Objectif pour la prochaine fois
Commencer à rédiger le product backlog précisément sur la mécanique