Coupe 2A - réunion 2, spécification des éléments
Coupe 2A - réunion 2, spécification des éléments
Mécanique
- déplacement: moteur, encodeur, carte puissance
- énergie : batterie, carte de sécu, carte d’alim, arrêt urgence
- contrôle : microcontroleur principale, sous modules pour actioneur ?
-> penser aux PWM
- détection:
- bords: capteur en partie basse ? (important pour les recalages)
- ecocup: pour les éviter ? pour les récupérer ?
- adversaire: Lidar partie supérieure ? (en priorité)
- action:
- phare: un bras simple devant ou comme l’année dernière sur les
côtés
- manche à air: meme bras que manche à air
- ramasser les ecocups:
- ecocups écueils: plus simple, pas mal de point, actionneur
badass
- ecocups sur table: prévoir des emplacements ?
- balise N/S: arduino nano -> rf433MHz
- pavillon: on reprend pareil ou on met juste un petit servo
- affichage: comptage des points (réduction de la taille,
utilisation d’un afficheur 16x2, ???)
- utilisateur:
- démarrage, switch équipe, switchs configuration
- bip
- reset total
- écran pour l’état ? (avec les points ?)
- debug: dans le code prévoir des fonctions qui renvoie les données
importantes
Électronique
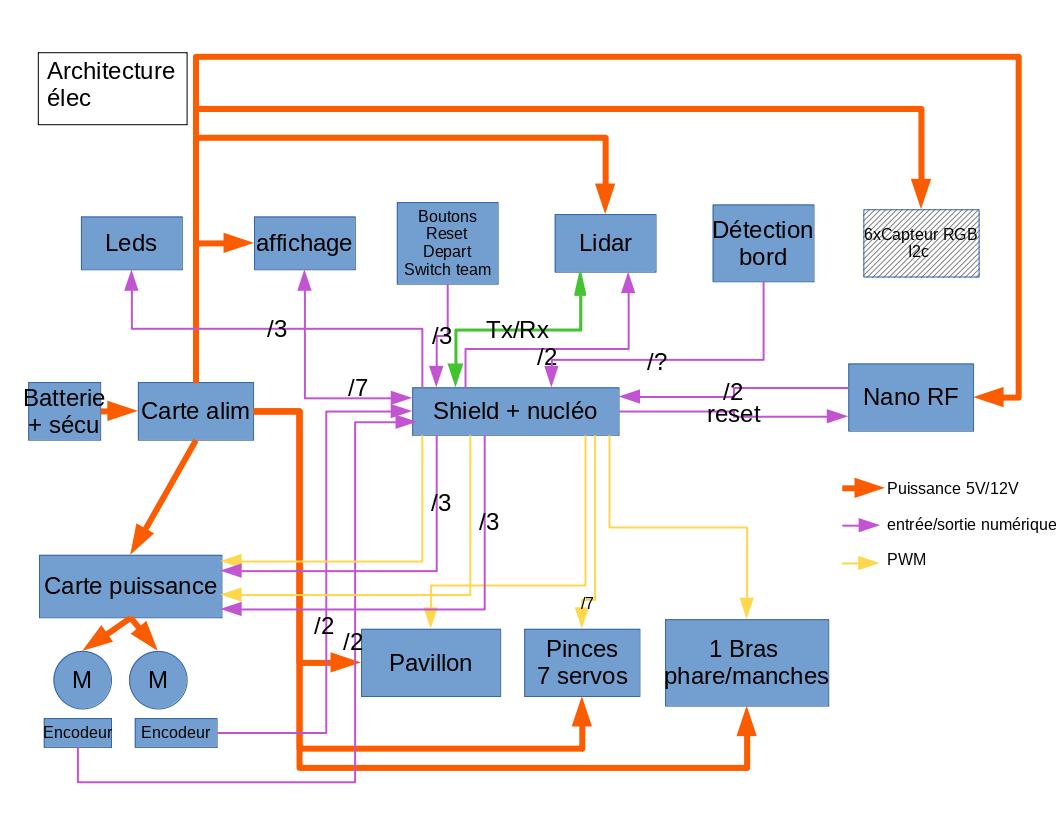
- capteur
- encodeur
- Lidar
- detection bord
- bouton init
- RF
- action
- pince écueil
- pavillon
- bras
- moteur
- afficheur
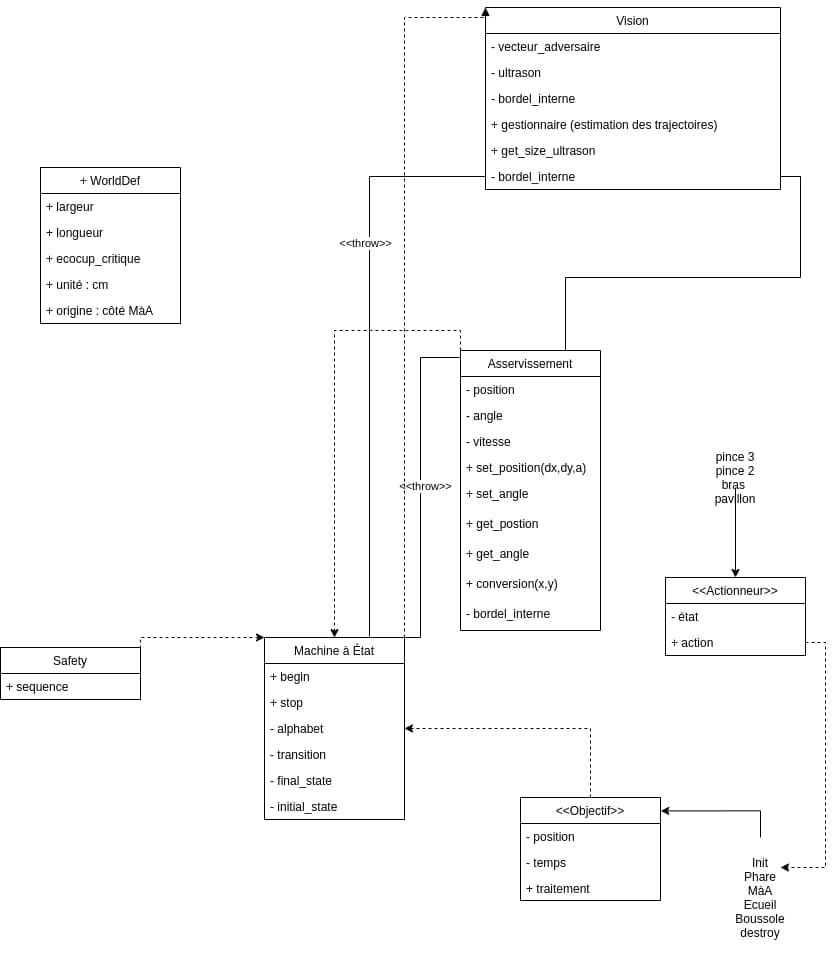
- traitement
- modéliser l’environnement
- navigation
- définition objectifs
- gestion des objectifs
- contraintes
- temps 100s
- puissance calcul et RAM
- asserv en tache de fond
This site uses cookies. By continuing to use this website, you agree to their use. I Accept