Référence de la classe Protocole
Contient toutes les méthodes permettant d'utiliser le protocole côté nucléo. Plus de détails...
#include <Protocole_nucleo.hpp>
Types publics | |
| enum | Etat { OK, TIME_OUT, OBSTACLE, ERROR } |
| Permet de transmettre à la rasp les possibles erreurs du protocole. Plus de détails... | |
Fonctions membres publiques | |
| void | update_state () |
| void | act () |
| void | print_dbg () |
| void | poll () |
| Protocole (std::string device) | |
| Permet d'initialiser la communication sur le port usb. Plus de détails... | |
| enum Etat | set_position (short x, short y, char etats[3], int timeout) |
| Permet de demander un changement de position à l'asservissement. Plus de détails... | |
| enum Etat | set_detection_GP2 (char actif) |
| Permet de demander l'activation où la désactivation des GP2. Plus de détails... | |
| enum Etat | set_angle (short angle) |
| Permet de demander une rotation du robot. Plus de détails... | |
| enum Etat | set_actionneur (char id, char on) |
| Permet de demander le déploiement d'un actionneur. Plus de détails... | |
| enum Etat | get_angle (short *angle) |
| Permet de demander la valeur de l'angle. Plus de détails... | |
| enum Etat | get_position (struct position *pos) |
| Permet de demander la valeur de la position. Plus de détails... | |
| enum Etat | get_etats_GP2 (char etats[3]) |
| Permet de demander l'état des GP2. Plus de détails... | |
| void | print_buffer (char *buf) |
| Fonction permettant d'afficher le buffer à fin de debug. | |
Attributs publics | |
| short | x |
| short | y |
| short | angle |
| char | GP2_on |
| char | GP2_etats [3] |
| char | actionneur_id |
| char | actionneur_etat |
Description détaillée
Contient toutes les méthodes permettant d'utiliser le protocole côté nucléo.
Contient les méthodes pour envoyer ou obtenir des informations à la nucléo.
Documentation des énumérations membres
◆ Etat
|
strong |
Permet de transmettre à la rasp les possibles erreurs du protocole.
- Paramètres
-
OK Tout c'est déroulé comme prévu TIME_OUT La nucléo à dépasser le temps qu'il lui était accordé pour répondre OBSTACLE Les GP2 ont détecté un obstacle ERROR Une erreur fatale est survenue
Documentation des constructeurs et destructeur
◆ Protocole()
| Protocole::Protocole | ( | std::string | device | ) |
Permet d'initialiser la communication sur le port usb.
- Paramètres
-
device nom du port usb, l'executable peut nécessité un lancement en super utilisateur pour réussir à accéder au port usb
- Bogue:
- Lors de la première exécution le protocole est mal initialisé, lors de la deuxième éxécution il revient à son état normal
Documentation des fonctions membres
◆ get_angle()
| enum Protocole::Etat Protocole::get_angle | ( | short * | angle | ) |
Permet de demander la valeur de l'angle.
- Paramètres
-
[out] angle pointeur contenant la valeur de l'angle après l'exécution de la fonction
- Renvoie
- Un état nous indiquant le résultat de la requête
Voici le graphe des appelants de cette fonction :

◆ get_etats_GP2()
| enum Protocole::Etat Protocole::get_etats_GP2 | ( | char | etats[3] | ) |
◆ get_position()
| enum Protocole::Etat Protocole::get_position | ( | struct position * | pos | ) |
Permet de demander la valeur de la position.
- Paramètres
-
[out] pos pointeur contenant une structure position après l'exécution de la fonction
- Renvoie
- Un état nous indiquant le résultat de la requête
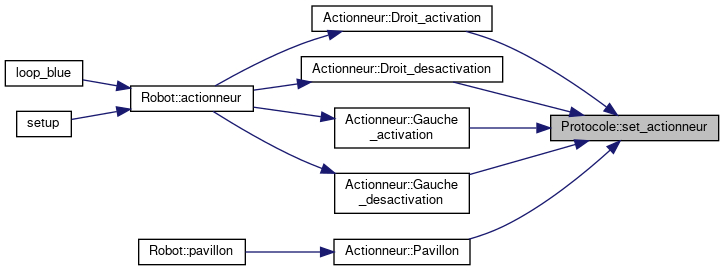
◆ set_actionneur()
| enum Protocole::Etat Protocole::set_actionneur | ( | char | id, |
| char | on | ||
| ) |
Permet de demander le déploiement d'un actionneur.
- Paramètres
-
id l'actionneur en question 0 pour le bras gauche, 1 pour le bras droit et 2 pour le pavillon on permet de demander l'activation (1) ou la désactivation (0)
- Renvoie
- Un état nous indiquant le résultat de la requête
Voici le graphe des appelants de cette fonction :
◆ set_angle()
| enum Protocole::Etat Protocole::set_angle | ( | short | angle | ) |
Permet de demander une rotation du robot.
- Paramètres
-
angle un angle compris entre 0 et 360°
- Renvoie
- Un état nous indiquant le résultat de la requête
Voici le graphe des appelants de cette fonction :

◆ set_detection_GP2()
| enum Protocole::Etat Protocole::set_detection_GP2 | ( | char | actif | ) |
Permet de demander l'activation où la désactivation des GP2.
- Paramètres
-
actif '1' pour activer '0' pour désactiver /! caractère '1' et non 1
- Renvoie
- Un état nous indiquant le résultat de la requête
Voici le graphe des appelants de cette fonction :

◆ set_position()
| enum Protocole::Etat Protocole::set_position | ( | short | x, |
| short | y, | ||
| char | etats[3], | ||
| int | timeout | ||
| ) |
Permet de demander un changement de position à l'asservissement.
- Paramètres
-
x le changement en x y le changement en y [out] etats TODO: définir signification ou enum timeout temps accordé à la nucléo pour répondre à la requette
- Renvoie
- Un état nous indiquant le résultat de la requette
La documentation de cette classe a été générée à partir du fichier suivant :
- code/nucleo/lib/Protocole/Protocole_nucleo.hpp
- code/protocole_test/src/Protocole.hpp
- code/nucleo/lib/Protocole/Protocole_nucleo.cpp
- code/protocole_test/src/Protocole.cpp