Référence du fichier main.hpp
Fichier principal pour l'execution de notre projet. Plus de détails...
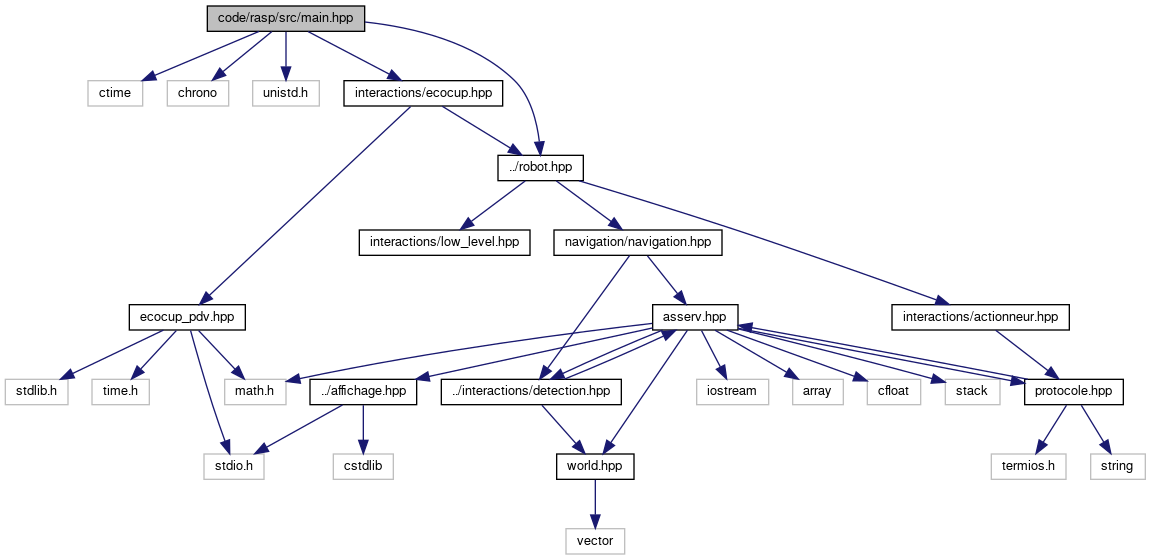
#include <ctime>#include <chrono>#include <unistd.h>#include "interactions/ecocup.hpp"#include "robot.hpp"
Graphe des dépendances par inclusion de main.hpp:
Aller au code source de ce fichier.
Fonctions | |
| void | parse_opts (int argc, char *argv[], int *pc, string *side) |
| void | setup () |
| Initialisation des différents éléments. | |
| void | loop_blue (std::chrono::steady_clock::time_point BeginMeasurement) |
| Boucle principale du projet. | |
| void | loop_yellow (std::chrono::steady_clock::time_point BeginMeasurement) |
| int | main (int argc, char *argv[]) |
Description détaillée
Fichier principal pour l'execution de notre projet.