Référence de la classe Robot
Contient toutes les méthodes et les attributs du robot. Plus de détails...
#include <robot.hpp>
Graphe de collaboration de Robot:
Fonctions membres publiques | |
| Robot (shape dimension) | |
| string | calibration () |
| Récupère l'information sur le côté de la table. | |
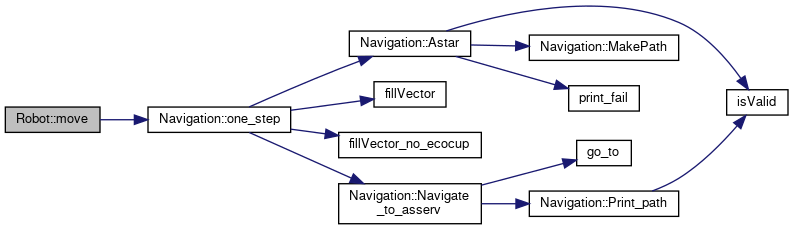
| void | move (Node src, Node dest, vector< obstacle > list_obstacles) |
| Déplace le robot en utilisant l'Astar. Plus de détails... | |
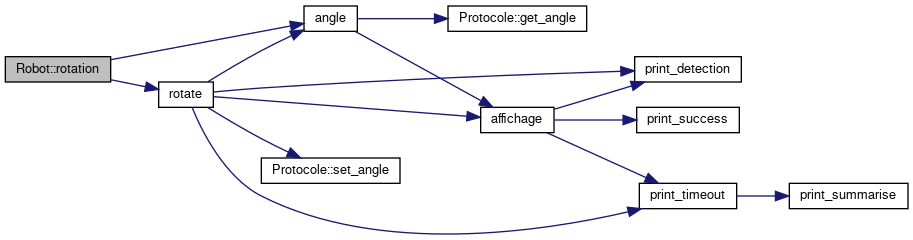
| void | rotation (short angle) |
| Fait une rotation du robot. Plus de détails... | |
| struct position | position () |
| Demande la position du robot. | |
| short | angle_robot () |
| Demande l'angle du robot par rapport à la table. | |
| void | detection (char cote, char activation) |
| Active ou désactive la détection. Plus de détails... | |
| void | actionneur (int side, int activation) |
| Sort ou rentre un actionneur. Plus de détails... | |
| void | pavillon (int activation) |
| Active le pavillon. | |
| int | depart () |
| int | communication_phare () |
| Gère la communication avec la boussole et la caméra. | |
| int | communication_boussole () |
| Gère la communication avec le phare. | |
| void | add_score (int add) |
| void | setup_score () |
| void | set_score (int score) |
Attributs publics | |
| const struct shape | dimension |
| Taille du robot. | |
Description détaillée
Contient toutes les méthodes et les attributs du robot.
Documentation des fonctions membres
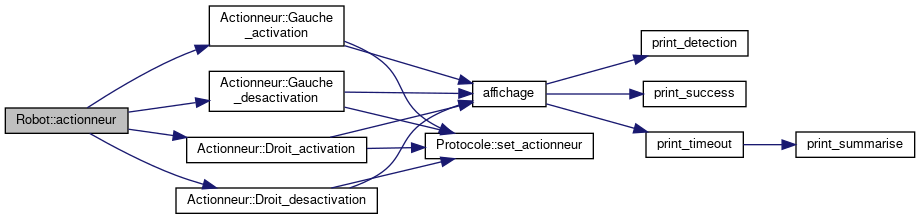
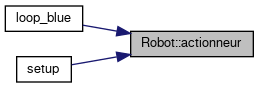
◆ actionneur()
| void Robot::actionneur | ( | int | side, |
| int | activation | ||
| ) |
Sort ou rentre un actionneur.
- Paramètres
-
side cote de l'actionneur à sortir activation activer ou désactiver l'actionneur
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :
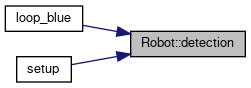
◆ detection()
| void Robot::detection | ( | char | cote, |
| char | activation | ||
| ) |
Active ou désactive la détection.
- Paramètres
-
cote cote d'activation (avant / arrière) activation activer (1), désactiver (0)
Voici le graphe d'appel pour cette fonction :

Voici le graphe des appelants de cette fonction :
◆ move()
Déplace le robot en utilisant l'Astar.
- Paramètres
-
src : début dest : fin list_obstacles : les obstacles à considérer
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :

◆ rotation()
| void Robot::rotation | ( | short | angle | ) |
Fait une rotation du robot.
- Paramètres
-
angle angle à tourner
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :

La documentation de cette classe a été générée à partir du fichier suivant :
- code/rasp/src/robot.hpp
- code/rasp/src/robot.cpp