Fichier d'interface avec l'asservissement, permet d'utiliser le protocole de communication pour demander des informations ou envoyer des ordres à la nucléo. Plus de détails...
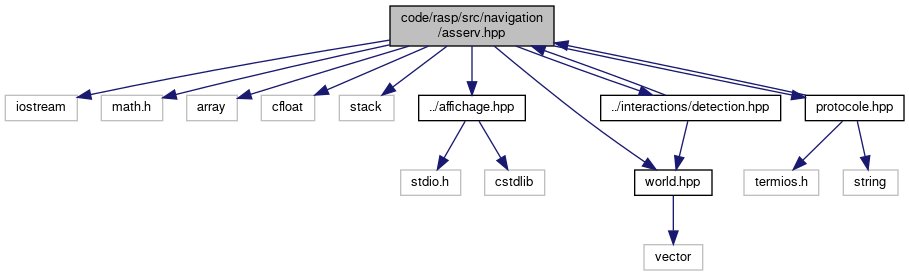
#include <iostream>#include <math.h>#include <array>#include <cfloat>#include <stack>#include "../affichage.hpp"#include "world.hpp"#include "protocole.hpp"#include "../interactions/detection.hpp"
Graphe des dépendances par inclusion de asserv.hpp:
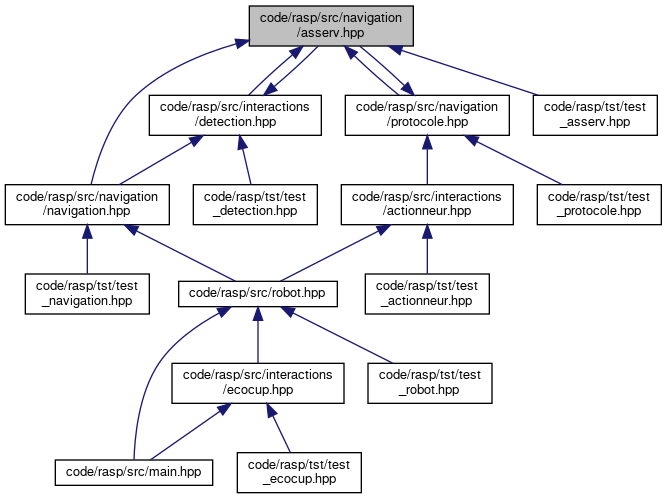
Ce graphe montre quels fichiers incluent directement ou indirectement ce fichier :
Aller au code source de ce fichier.
Classes | |
| struct | position |
| Simple structure permettant de définir une position. Plus de détails... | |
Fonctions | |
| int | go_to (struct position dest) |
| Permet de transmettre au protocole l'ordre de se déplacer. Plus de détails... | |
| int | call_back (int asserv_back) |
| Permet d'analyser le retour de l'asservissement et d'adopter un comportement en conséquence. Plus de détails... | |
| void | rotate (short angle) |
| Permet d'ordonner la rotation du robot. Plus de détails... | |
| struct position | robot_position () |
| short | angle () |
| Permet de demander l'information sur l'angle du robot par rapport à la table. Plus de détails... | |
Variables | |
| bool | debug |
| vector< Node > | debugPath |
| class Protocole | Protocole |
Description détaillée
Fichier d'interface avec l'asservissement, permet d'utiliser le protocole de communication pour demander des informations ou envoyer des ordres à la nucléo.
Documentation des fonctions
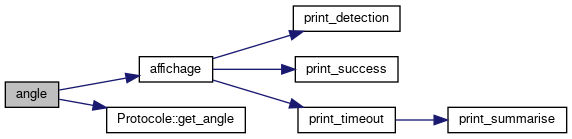
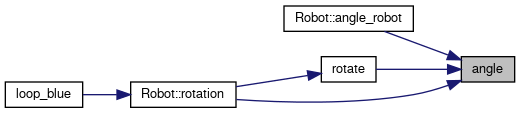
◆ angle()
| short angle | ( | ) |
Permet de demander l'information sur l'angle du robot par rapport à la table.
- Renvoie
- un short entre 0 et 360°
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :
◆ call_back()
| int call_back | ( | int | asserv_back | ) |
Permet d'analyser le retour de l'asservissement et d'adopter un comportement en conséquence.
- Paramètres
-
asserv_back entier de retour de l'asservissement 0: normal 1: timeout 2:detection 3:panique
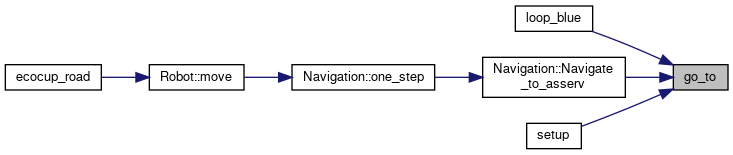
◆ go_to()
| int go_to | ( | struct position | dest | ) |
Permet de transmettre au protocole l'ordre de se déplacer.
- Paramètres
-
dest la position à atteindre src la position
- Renvoie
- Le code d'erreur associé au traitement de l'ordre par le protocole
Voici le graphe des appelants de cette fonction :
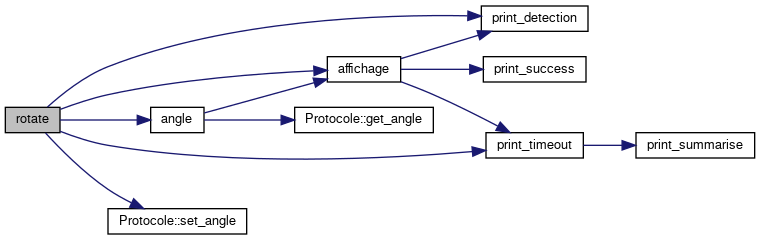
◆ rotate()
| void rotate | ( | short | angle | ) |
Permet d'ordonner la rotation du robot.
- Paramètres
-
angle l'angle en degrés
Voici le graphe d'appel pour cette fonction :
Voici le graphe des appelants de cette fonction :
